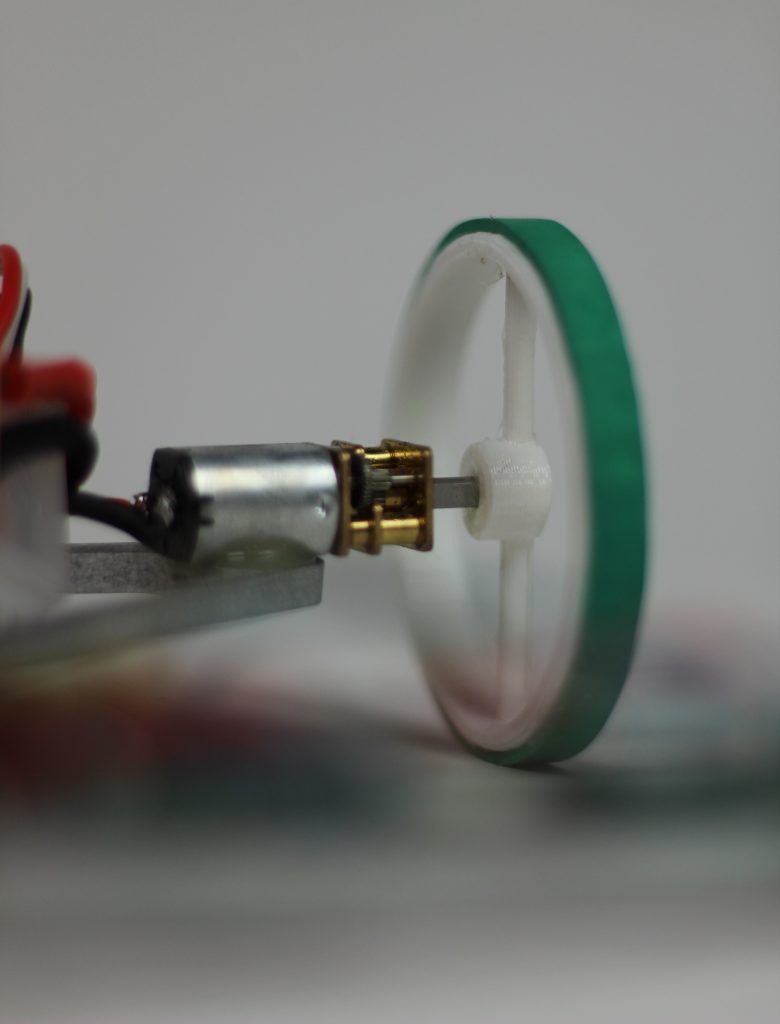
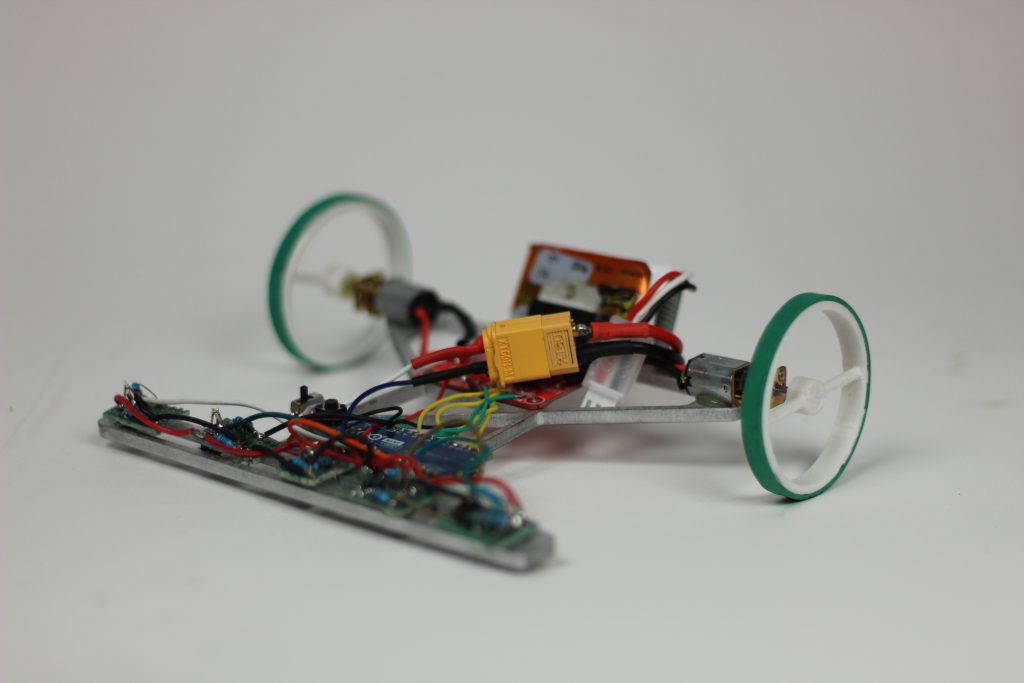
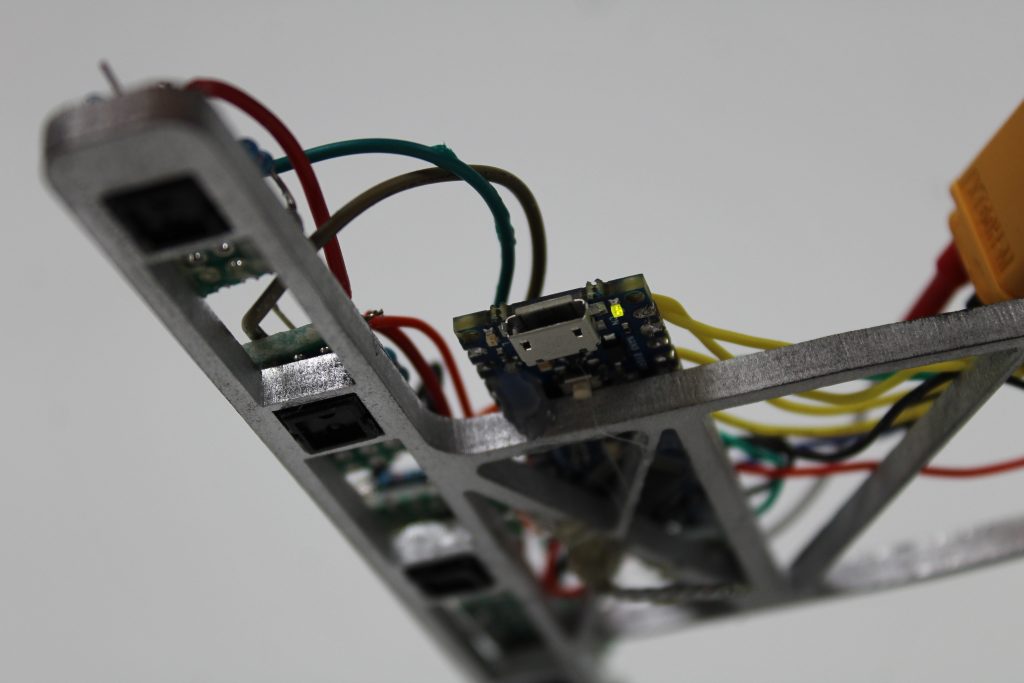
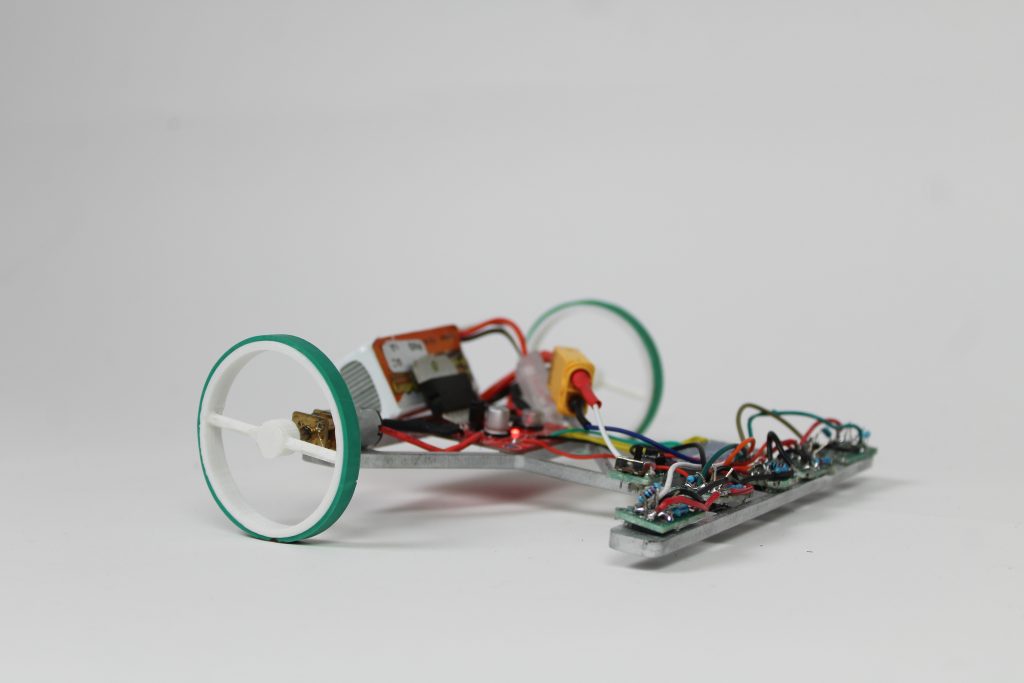
The project focused on the design and construction of a robot capable of following a path marked by a black-colored line using photoreceptors. The objective of this project was to represent the robots used for sorting in warehouses by tracking predefined routes. The aim was to develop a prototype that was as lightweight as possible, achieving a final weight of 116 grams. The main focus was on optimizing the robot’s performance, ensuring precise line tracking and appropriate maneuverability along the established route. Through meticulous design and development, a lightweight yet robust robot was successfully built, capable of navigating the designated path using its integrated photoreceptors. This project represents a personal achievement in the exploration and development of automation solutions.